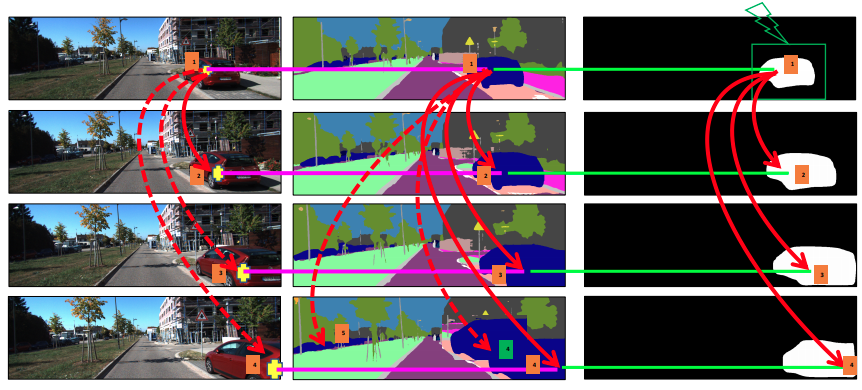
IVO: Instance-based Visual Odometry
Guoxiang Zhou at al.
Master Thesis at CVG, ETH Zurich
Available upon request. PDF Copy.
Guoxiang Zhou at al.
Master Thesis at CVG, ETH Zurich
Available upon request. PDF Copy.
Guoxiang Zhou, Berta Bescos, Marcin Dymczyk, Mark Pfeiffer, José Neira , Roland Siegwart
Accepted by the Workshop at IROS 2018: From freezing to jostling robots: Current challenges and new paradigms for safe robot navigation in dense crowds